Tenacity
About
For the final project in Olin's Principles of Engineering class my team designed and built a
variable strength robotic gripper. Using a combination of computer vision and pressure variable resistors
it can react and change its grip to secure what it is holding.
The underactuated fingers of the hand, one of the largest parts of our research in designing this hand, uses
a combination of passive and active actuation. It uses T
Full documentation of the project can be found in depth here.
Skills
- Raspberry Pi - Setup and used to operate the camera and run OpenCV. Also implemented phone control over Olin's network.
- Arduino - Controlled finger movements through servos and sent sensor data over serial to Raspberry Pi.
- Solidworks - The base, wrist, and arm structure for the project were CADed by me in Solidworks
- Python - Script to send and recieve from Arduino and Raspberry Pi. Used OpenCV to detect slipping grip using bounding boxes and subject finding.
- 3D Printing - Many iterations of the fingers, from their brackets to the FESTA fingers (printed in TPU), were printed throughout the process. This allowed us to quickly implement what we researched and try out different ideas we came up with.
- Laser Cutting - Cut out all wooden parts and did the logo rastering with Epilog Helix laser cutter
Team
- Samantha Eppinger - Mechanical Engineer
- William Derksen - Software Engineer
- Ava Lakmazaheri - Mechanical Engineer
- Prava Dhulipalla - Electrical Engineer
Tenacity in action
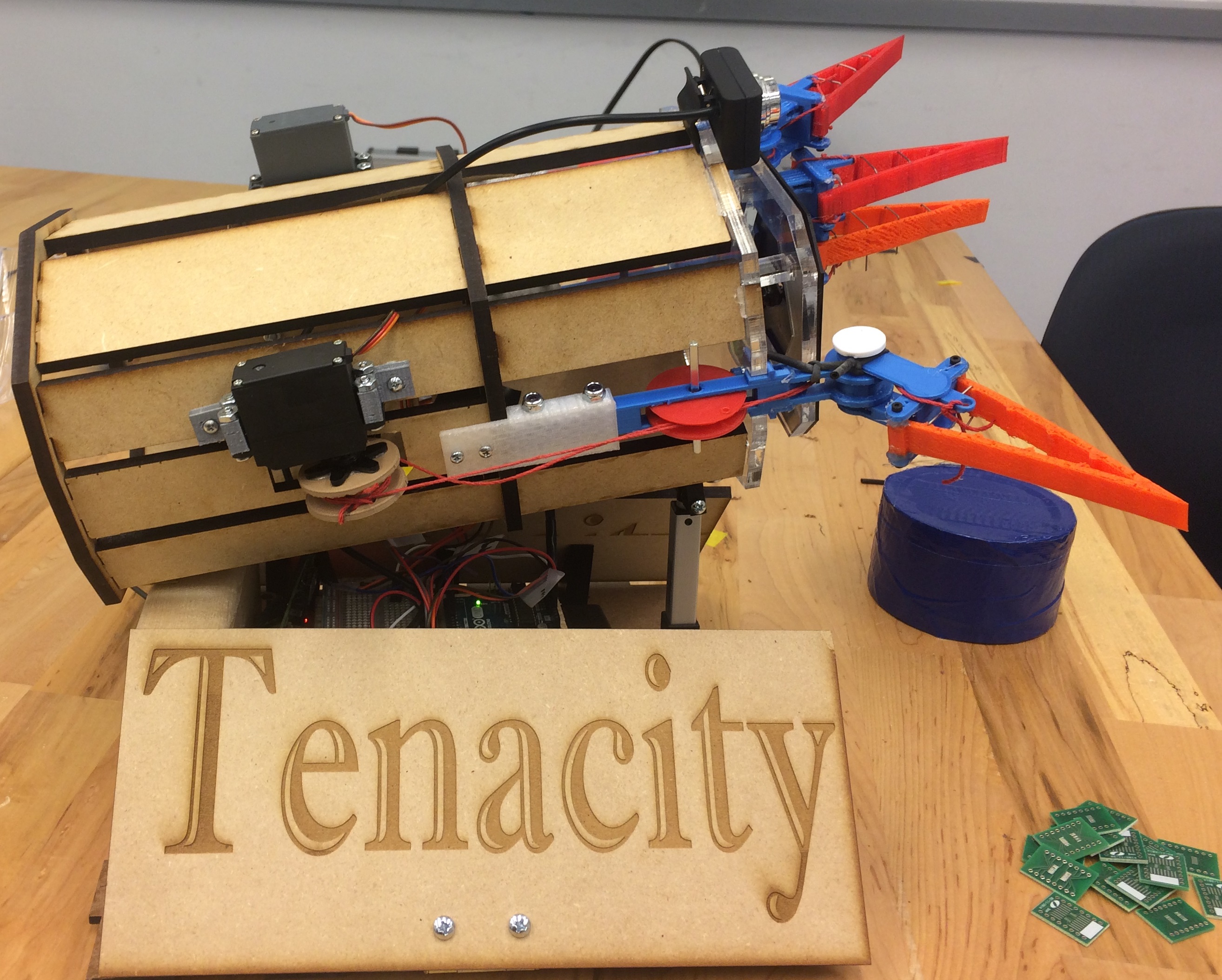
Final Product
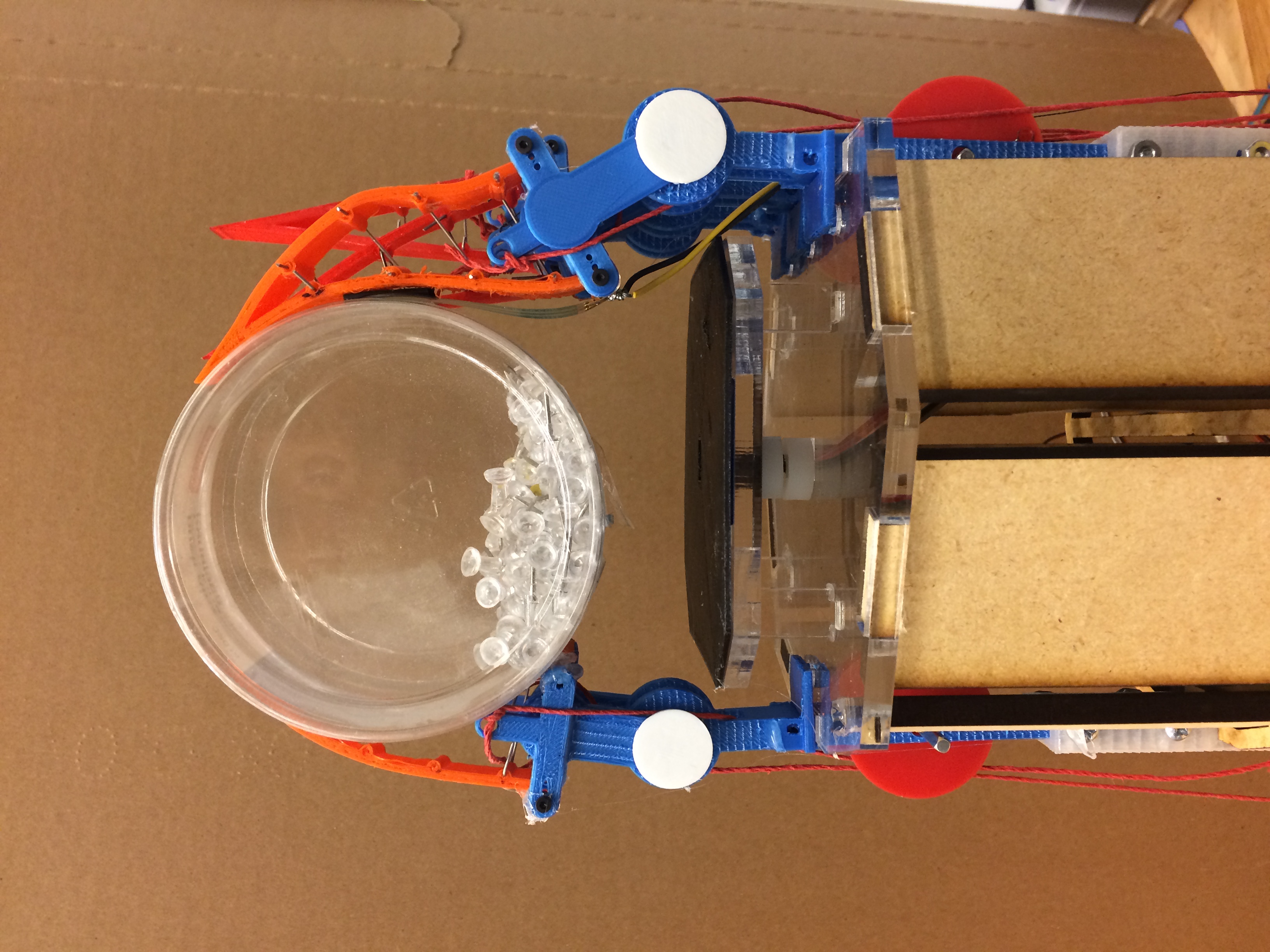
Gripping a container
FESTO finger design in action to hold rounded surface
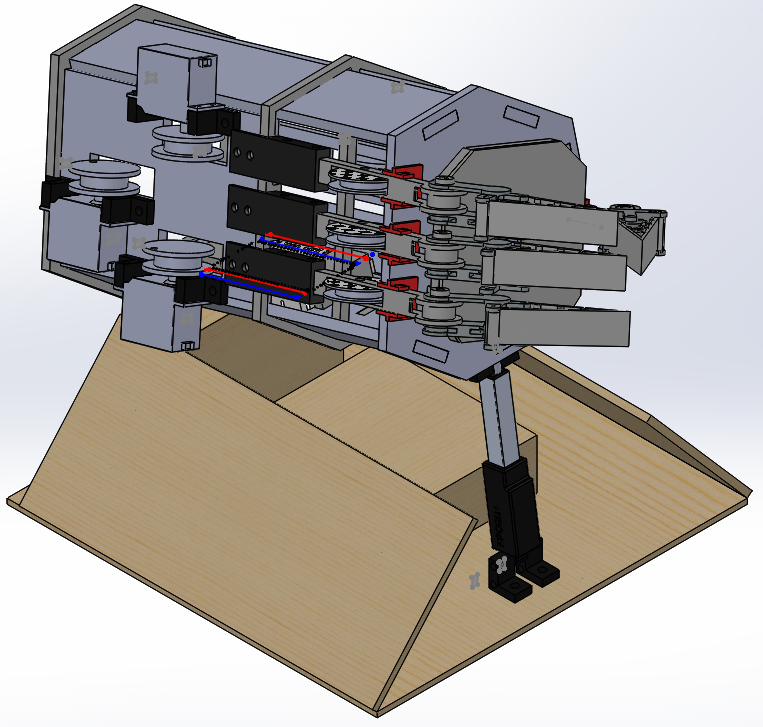
Final CAD of Mechanical